生物模倣型ロボットビジョンシステム
本研究では生物を参考にした生物模倣型ロボットビジョンシステムの研究を進めています。
このシステムは視野内の複数物体を高速に視野中心で注視することができ、様々な分野での応用が可能です。
研究概要
図1.提示した視覚刺激
ヒトの視覚は視野中心部から周辺部へかけて空間分解能が低下するため、注視が重要な役割を果たします。しかし複数物体の中から特定の対象物を注視するアルゴリズムは不明です。そこで当グループは、単純図形を提示した際のヒト眼球運動を測定する心理物理タ験を行ない、注視する画像の特徴と眼球運動の関係を分析しました。
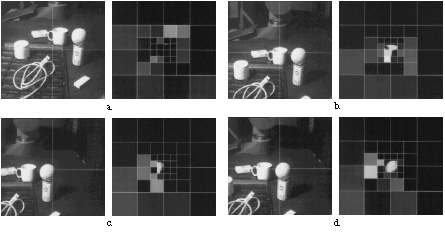
図2.ロボットビジョンが見ている映像
図3.ロボットビジョンの視線移動軌跡
図4.人による視線移動(左)とロボットビジョンによる視線移動(右)
視細胞ならびに網膜神経節細胞の網膜上における空間分布ならびに網膜神経節細胞の樹状突起の広がりをモデル化し、そのモデルで処理された画像情報に基づいて視線を移動する注視アルゴリズムを構築しました。そして測定したヒトの眼球運動結果とアルゴリズムの計算機シミュレーションで得た注視実験結果を定量的に比較したところ、注視点に近接している視覚刺激ほど優先的に注視されることが明らかになりました。次に、この研究成果をロボットビジョンへ応用したシステムを開発しました。このシステムは、上記の網膜モデルを用いて画像を処理することで、複雑な画像処理を行うことなく、複数物体を高速に視野中心で捕捉することができます。そのため生産システム・防犯・軍事用ビジョンシステムへの応用が期待されています。